
UNISONのむたです。
本日は、ARLISSのローバーチームのレビュー会を見学しに行ってきました。
場所は電気通信大学多摩川グラウンド。
いつもは運動部が使用しているそうですが、
電通大の高玉先生が、交渉をして丸一日グラウンドを借りて下さいました。
ありがとうございます!
本日の参加チームは
慶應ちーむ

東北大ちーむ

電機大ちーむ

理科大ちーむ

電通大Aちーむ

電通大Bちーむ

九大ちーむ(とはいっても遠いので、チームから1人だけ来てくれました!)

まずは高玉先生からルール説明をしていただきました。

このローバーのレビュー会はローバーの国内大会というべき重要な大会で、
この大会で、きちんと記録を残せなければ、ARLISSに行くことはできません。
文書ならある程度かけてしまう開発状況でも、実際に実機を持ってきて動くかどうか試すというのはかなり厳しい審査ですね。どのチームも必死です。
例年ローバーチームはこのようなレビュー会を1か月前に実施しており、
その効果があってか、なかなかフライバックチームはローバーチームにかないません。。。
今年はフライバックもレビュー会をやるそうで、これは良い試みなのではと思っております。
1チーム10分×3回のチャンスがあり、その時間内に、
低いところから自由落下→着地判定→パラシュート切り離し→ナビゲーション(目的地に向かう制御)→目的地の半径10m以内に入る
までが行えればクリアです。
校庭の端からローバーを落とします。

着地したローバーは自身の着地判定によりパラシュートを切り離します。
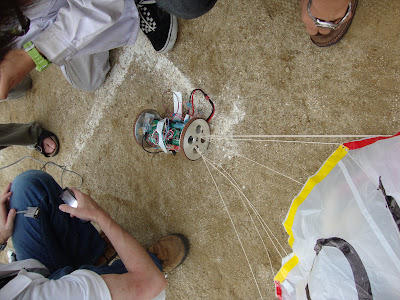
切り離したら、GPSなどを使って自分の位置と目標位置を計算。
走り出します。ローバーには決して触ってはいけません。

校庭の逆の端にある赤いコーン(写真の傘の奥)が目標値。
10メートル以内の円に入り、走るのをやめれば、ローバー自身がゴール判定したとみなされ、今回の課題はクリアです。

今回は途中で雨が降り出してしまったので、ローバーを守るために傘をさしながら行った回もありました。
私は途中までしかいなかったのですが、
電通大2チームと東北大チームが見事クリアしていました。
(理科大チームはあと一歩といったところでしたね)
本当に見事な電通大の回がこちら↓

残念ながら、15時頃から雨が強くなってしまい、レビューを続けることができなくなってしまったので、
続きは各チームの動画提出か、日曜日にまた集まるかのどちらかで行われるそうです。
いやーローバーのレビュー会は初めて見ましたが、すごい、の一言。
一か月前にここまでできているからこそ、ARLISS本番であんなに良い成績を残すことができるんですね。
フライバックもがんばってください!!
また、忘れてはいけないのは、今回のレビュー会では工学院のお二人が運営側としてさまざまな準備をしてくれました。
二人ともフライバックのCansatを作られているということで、自分の団体の開発で忙しい中、
ARLISSの運営に協力してくれているメンバーがいるからこそ、ARLISSが成り立っていることを忘れてはいけませんね。どうもありがとうございます。

運営の二人(写真手前の二人。その奥は伊藤君ですね)
さらにローバーのレビュー会に関しては高玉先生に全面的なご支援を頂いています。
この場を借りて、感謝申し上げたいと思います。
さて、明日はUNISEC事務局で総会の反省会をして来たいと思います!
ではでは
むた
0 件のコメント:
コメントを投稿